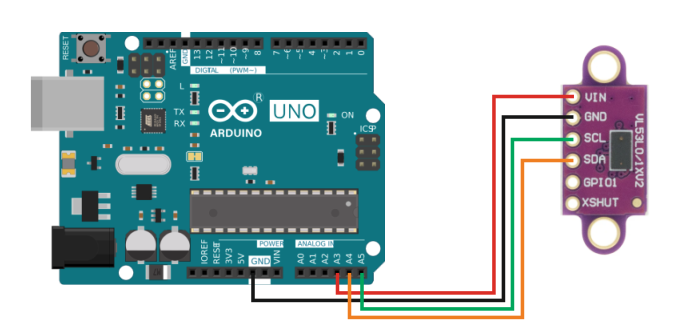
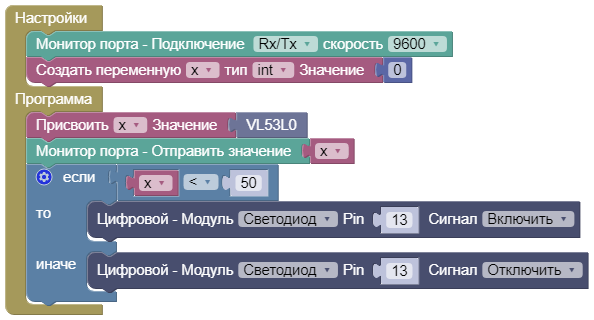
Получим данные с лазерного дальномера VL53L0 и отправим их в монитор порта.
#include <VL53L0X.h>
int x = 0;
VL53L0X sensor;
void setup() {
Serial.begin(9600);
Wire.begin();
pinMode(A3, OUTPUT);
digitalWrite(A3, 1);
sensor.setTimeout(500);
if (!sensor.init()) { while (1) {}}
#if defined LONG_RANGE
sensor.setSignalRateLimit(0.1);
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodPreRange, 18);
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodFinalRange, 14);
#endif
#if defined HIGH_SPEED
sensor.setMeasurementTimingBudget(20000);
#elif defined HIGH_ACCURACY
sensor.setMeasurementTimingBudget(200000);
#endif
}
void loop() {
x = sensor.readRangeSingleMillimeters();
Serial.println(x);
if (x < 50) {
pinMode(13, OUTPUT);
digitalWrite(13, 1);
} else {
pinMode(13, OUTPUT);
digitalWrite(13, 0);
}
}
Открыть пример: Online ArduBlock
Видеоурок: