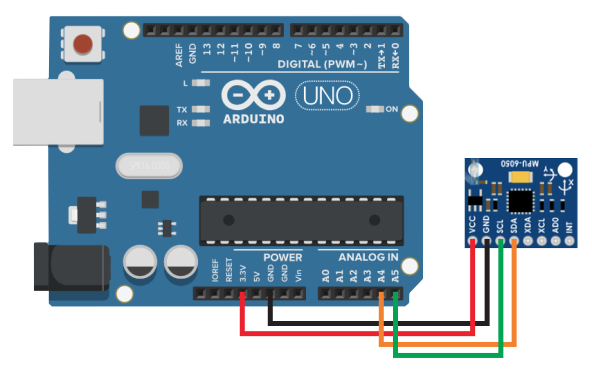
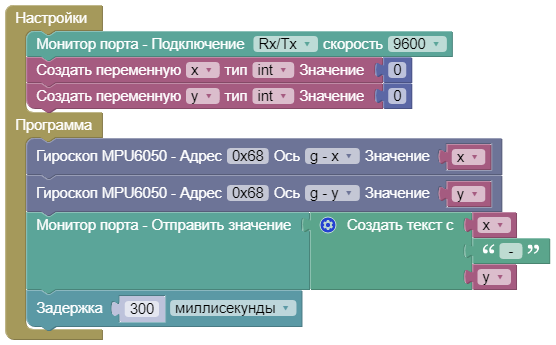
Получение данных с Гироскопа MPU6050
#include "I2Cdev.h"
#include "MPU6050.h"
#define TIME_OUT 20
int16_t ax, ay, az, gx, gy, gz;
MPU6050 accgyro;
int x = 0;
int y = 0;
void setup() {
Serial.begin(9600);
accgyro.initialize();
}
void loop() {
accgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
x = gx;
accgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
y = gy;
Serial.println((String(x) + String(" - ") + String(y)));
delay(300);
}
Открыть пример: Online ArduBlock
Видеоурок: