Arduino Pro Mini
Arduino Nano
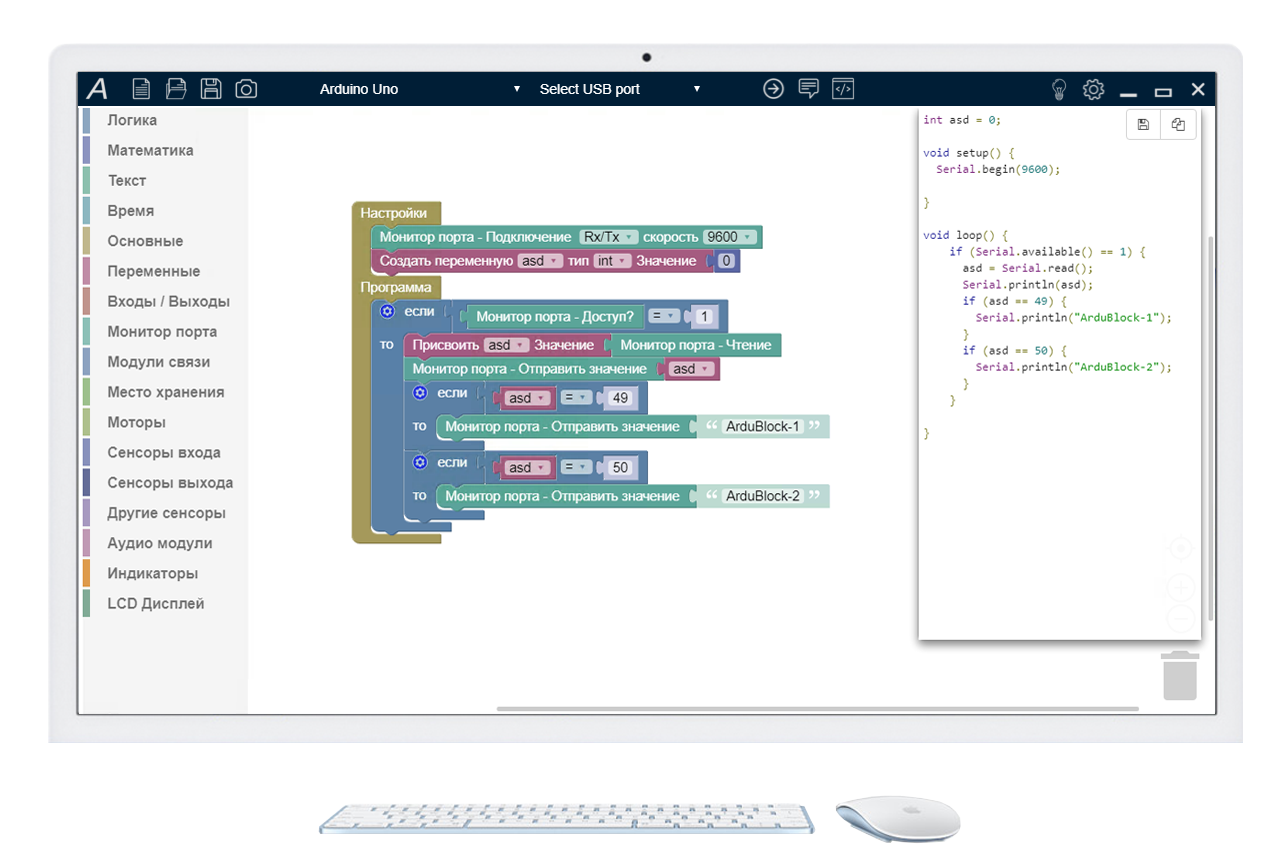
Arduino Uno
Arduino Mega
Arduino Pro Micro
Arduino Micro
Wifi Kit 32
Arduino Leonardo
ESP 8266 01
Wemos D1 Mini
NodeMDU
Wemos D1 UNO
Live Mini ESP 32
ESP 32 30
ESP 32 38
Wemos D1 R32